先天性の上肢形成不全症の子供たちに、筋電義手は断端部にある筋肉の信号を用いて義手の手指をコントロールし「動く手」を提供するものです。その信号のパターンはそれぞれ異なるため、人の動きを義手が学習する(義手が自分の動きに合わせる)AI技術を搭載した筋電義手を開発して、小児にもより馴染みのもてる筋電義手を提供できるように考えています。
筋電義手は断端部に残存する筋肉の信号を表面筋電図として捉えてこれを用いて義手の手指をコントロールするものである。従来は人が義手の電極にある筋を動かす(義手に自分の動きを合わせる)訓練が必要であったが、患者ごとに表面筋電パターンが異なるため、人の動きを義手が学習する(義手が自分の動きに合わせる)AI技術の搭載を検討する。
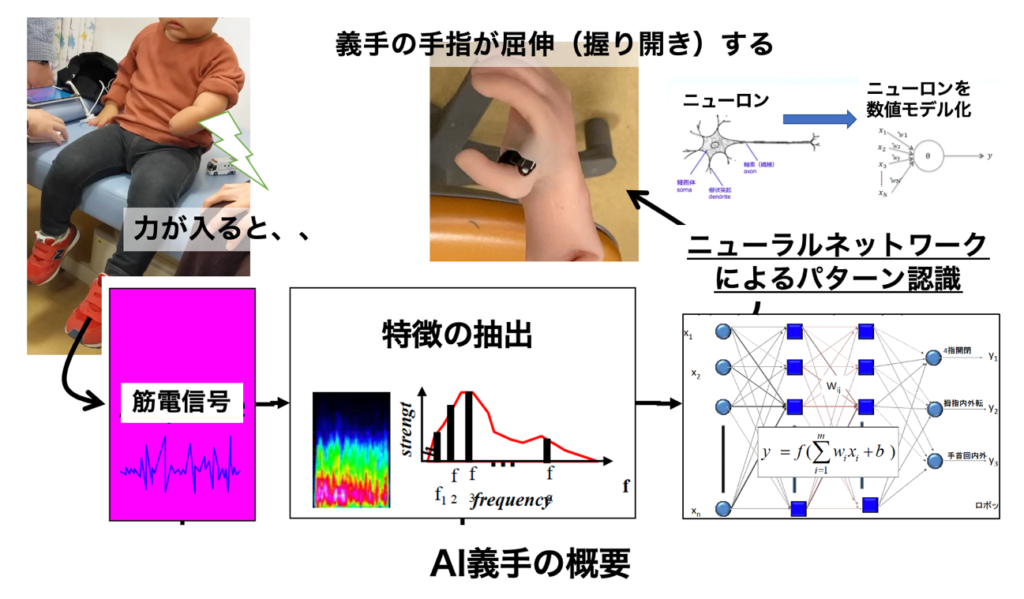
患者ごとに表面筋電パターンは異なるため、そのパターンを認識させて人の動きを義手が学習するシステムを搭載させていく。これは力が入ると筋電信号の特徴を抽出して、ニューラルネットワークを使ったパターン認識をする。手の力の入れ具合によってその筋活動を識別して、そのまま義手が動いてくれるものである。患児が「握る」とイメージした時の筋電パターンの特徴をマイクロコントローラに学習させ、義手の「握る」という動きを生み出すので、直感的に「握る」とイメージしたときに義手が握る動作を行える筋電義手となる。義手そのものに人の動きのくせを学習させてそのくせをもって義手が動くので、機能面でもより義手がより自分にフィットしたものとなる。機械学習の要素を搭載していることからもAI義手とも呼ぶべき概念となる。